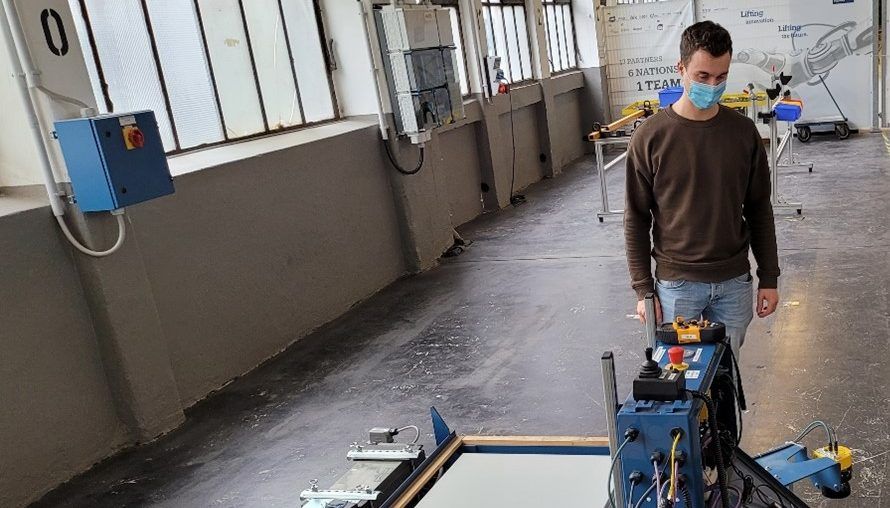
On Wednesday 27 January 2021, IFAK, TARAKOS and DEMAG were able to conduct a long-planned and successful remote session for implementations on the German demonstrator of the OPTIMUM project. The aim of the workshop was to display the current positions of the Automated Guided Vehicle (AGV) as a digital twin in the visualisation tool taraVRcontrol.
Before the position data of the machine could be provided using the interface DOME (Distributed Object Model Environment), some tools had to be updated. In addition, the position data of the AGV was not displayed correctly due to interface errors. As a result, the remote session lasted until late in the evening. Thanks to the great effort of the entire team, all sources of error were eliminated in the end and the digital twin of the AGV was successfully displayed. Thus, the remote session was a great success for the German partners and for the entire OPTIMUM project.
Participants:
- Duy Lam Tran (IFAK)
- Henry Cermann (TARAKOS)
- Giuliano Persico (DEMAG)
- Sven Müller (DEMAG)
- Daniel Schmidt (DEMAG)